
一 机器人平台



二 无人机平台
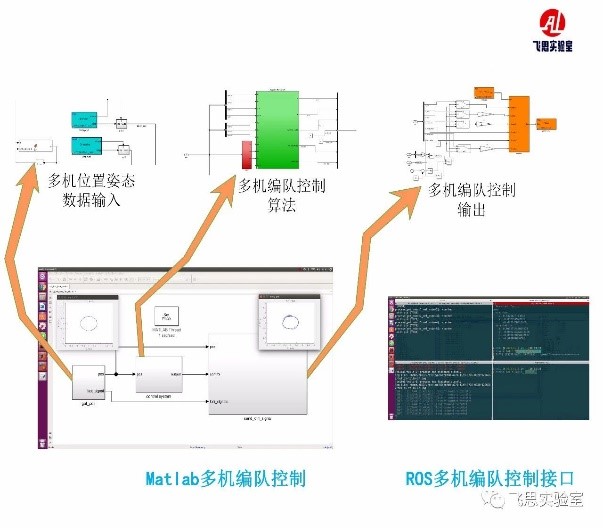
实验室平台可提供一套完整的集群控制开发、调试及验证环境。实验系统基于ROS/Matlab开发,开放性强,可用于无人系统的动态建模和控制研究、运动规划、避障控制、多信息融合、编队控制、多智能体协调控制、无人系统自主控制等技术验证,能为无人系统控制及多机集群控制等教学演示及二次开发提供核心设备支撑。
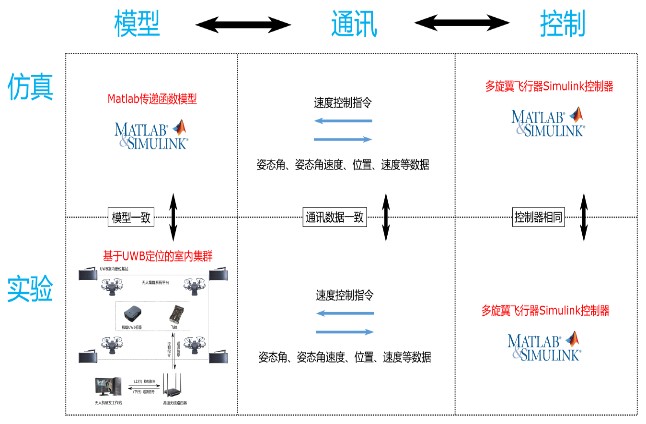
实验室的无人系统集群协同平台可以在多种定位系统环境下(光学定位、UWB定位、RTK定位等)实现无人机、无人车或两者之间的集群控制。可为GPS拒止环境下开展无人机集群系统自主安全控制提供定位支持。


团队已突破XBEE分布式网络和PIXHAWK飞控两项关键技术,并成功嵌入人工势场法、图论法等编队理论算法。在室内也已实现定点、直线、圆等常用队形演示,同时在飞行过程中可实时对无人机编队进行队形切换。该平台可以为多无人机飞行过程算法提供数据支持,并可以直接充当演示效果。
