一 多智能体编队导航
多机器人的编队导航技术是完成各种多体协同任务的前提条件,其主要目的是通过系统内部机器人之间局部的信息交互,使机器人能够形成并且维持一个特定的相对位置以及相对速度关系,实现队形保持、队形变化和避障等多机器人系统的基本功能。在军事领域,无人舰艇和无人机组成的异构机器人系统,能够完成协同作战、侦察和补给等任务,如大规模无人机蜂群作战。在民用领域,多机器人系统被广泛运用于野外位置环境建图、灾后救援等任务。

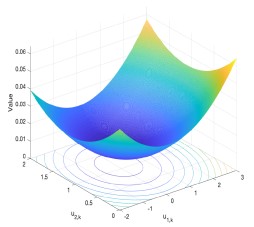
二 多智能体优化控制
多智能体的优化控制是通过多智能体之间的合作协调有效地实现优化的任务,相比集中式优化算法,分布式优化算法的鲁棒性更好,成为优化与控制领域的一个重要研究方向。目前,分布式控制方法依赖于多智能体系统精确模型已知和状态可观测,然而真实场景中系统的精确模型往往难以获取,如何基于数据而不是模型实现分布式控制已成为研究领域的重要挑战。随着强化学习在多智能体系统分布式控制里的普遍应用,尤其是海量历史数据作为技术的支撑,由数据驱动的控制算法在智能控制领域愈发受到重视。
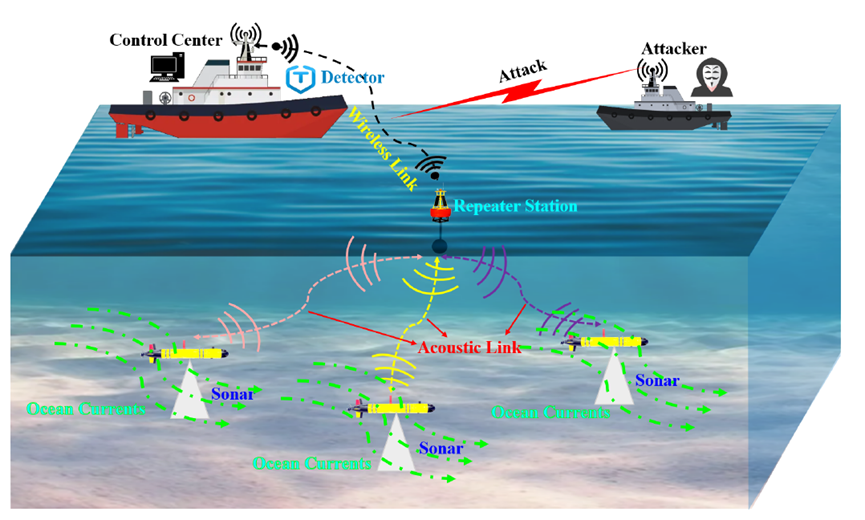
三 网络攻击与防御
网络攻防研究是以研究信息物理系统(包含多智能体系统)的网络攻击、滤波机制、安全检测和博弈控制为主要任务。相比现有的机制,数据驱动和博弈优化方法被引入来研究下一代攻防对抗为重点。目前,提出的攻击、检测、滤波机制,多是基于系统模型进行设计的,团队在无模型下对相关问题进行构建,通过通信的明文信息构建基于数据驱动的具有更强适应性的策略。同时考虑控制器智能性的提升,一类攻防对抗的策略被主要研究,这在网络安全领域备受关注,有利于为后续控制和安防提供新思路。
四 无人系统感知
1. 无人系统的基础视觉理论研究
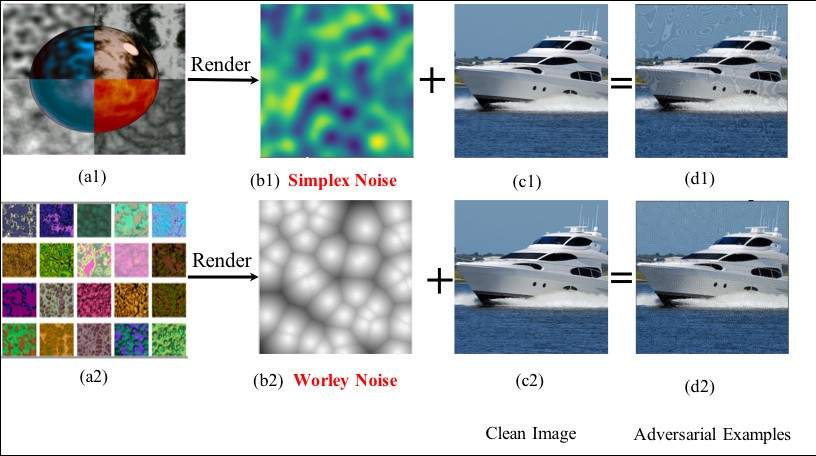
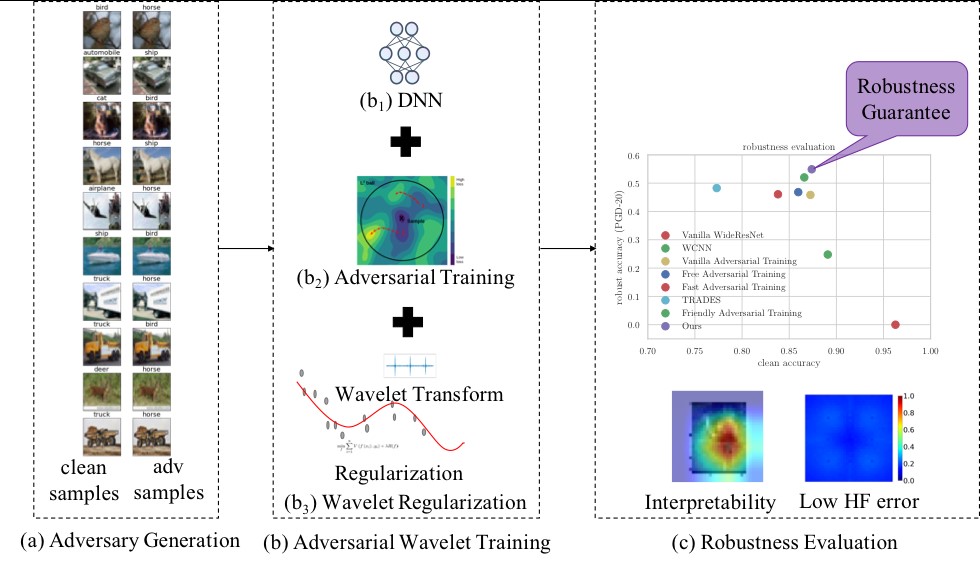
本理论研究是无人系统构建的基础理论研究,旨在探索无人系统中的可信赖视觉算法。本课题组基于傅里叶分析、小波分析、微分流形、信息瓶颈理论研究无人系统感知算法的对抗鲁棒性、跨域泛化性。本课题组研究各种对抗扰动与实际恶劣天气的联系、物理世界的攻击对视觉系统的欺骗,以帮助自动驾驶汽车、无人机等无人系统应对实际面临的干扰情况。
2. 无人系统的静态视觉算法研究
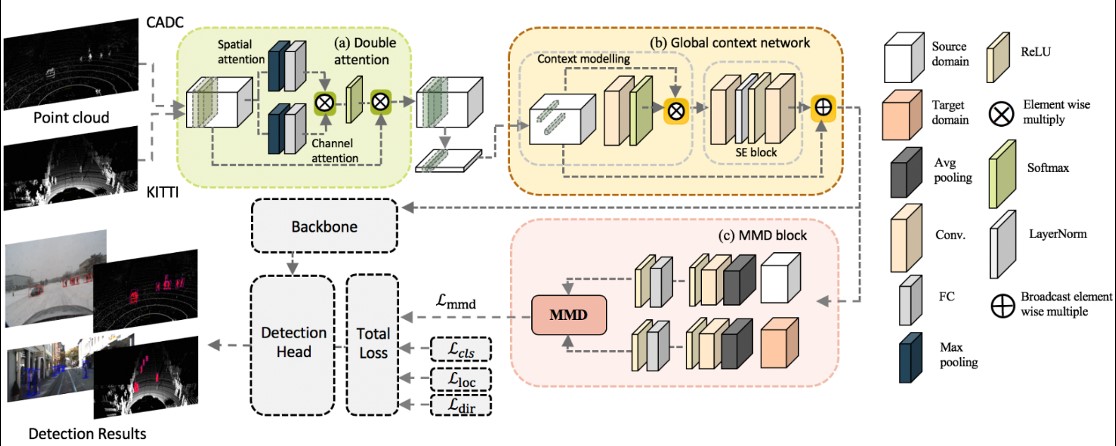
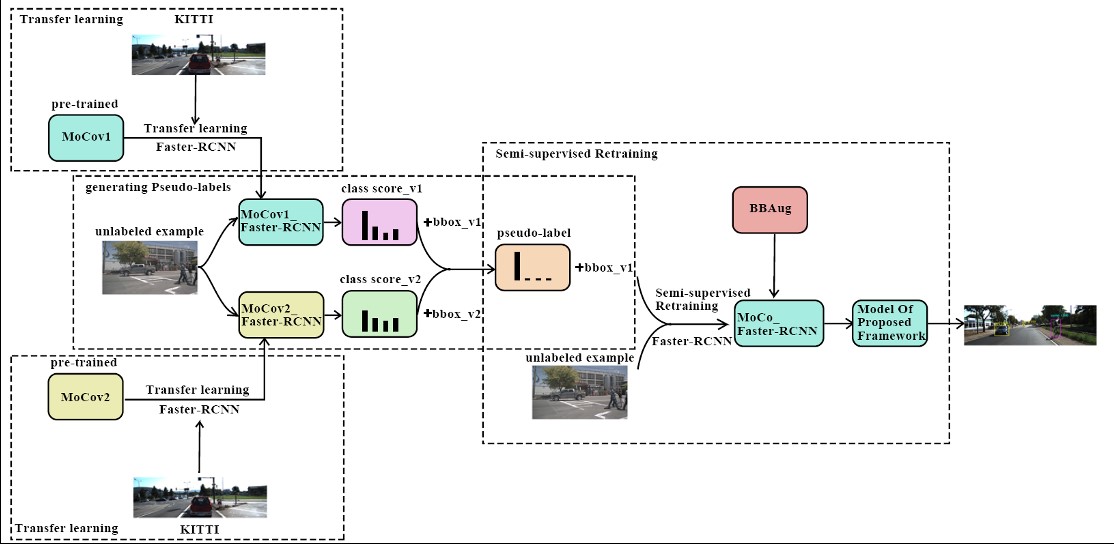
本研究立足基础理论,关注前沿应用,面向工程问题,发掘科学问题。基于摄像头、激光雷达或毫米波雷达的目标检测及场景分割算法是无人系统在实际运行过程中获取正确信息的关键。本课题组提出了基于鲁棒协同训练半监督学习的摄像头级自动驾驶目标检测算法、基于最大均值差异域适应的激光雷达全天候目标检测算法、基于图神经网络的多传感器融合的小目标检测算法。本课题组的研究有助于无人系统提升复杂多变的气候与地理条件下感知系统的性能。
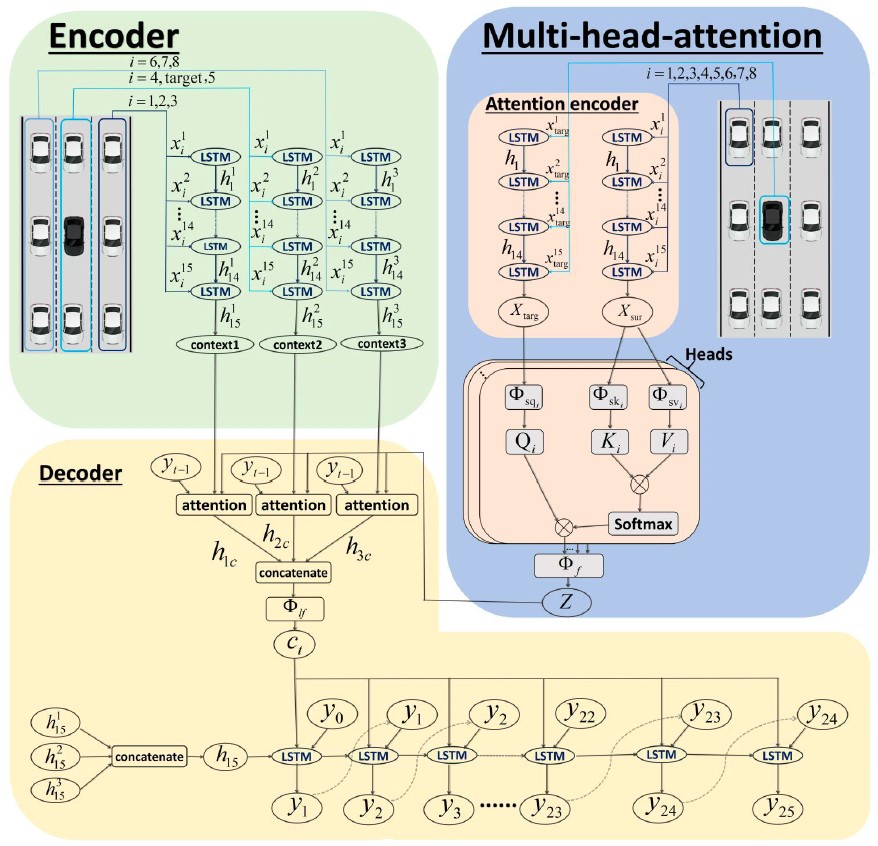
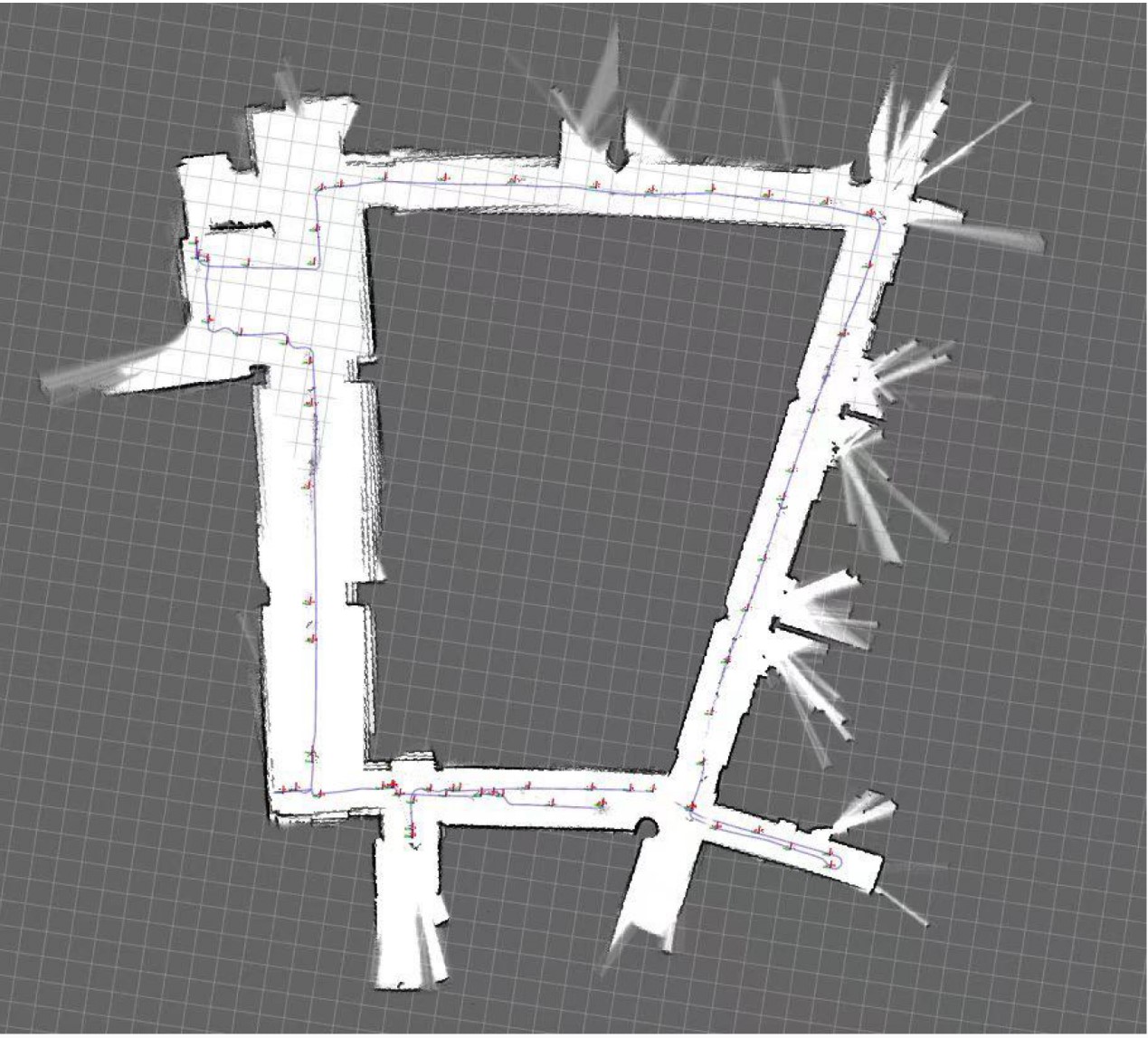
3. 无人系统的动态视觉算法研究
动态视觉算法研究是无人系统感知系统的重要环节,也为后端的决策、规划、控制模块提供了前端的输入,包括轨迹预测、即时定位与地图构建(SLAM)等任务。在轨迹预测任务中,本课题组提出了基于道路注意力与多头注意力机制的轨迹预测模型。在SLAM任务中,本课题组提出了基于松融合框架的点线特征融合双目slam算法,利用基于VQF(Versatile Quaternion-based Filter)算法完成惯性传感器(IMU)倾斜角矫正并改进估计偏移保证系统稳定,本课题组研发的多传感器融合的SLAM算法能移植到不同硬件平台驱动的无人系统(室内或室外机器人)。