近日,本实验室张皓教授指导的博士研究生付成程在《Automatica》期刊上发表长文“Adaptive cooperative output regulation of polytopic systems via spectrum estimation: An H∞ perspective “。
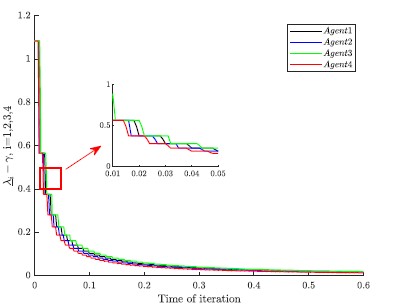
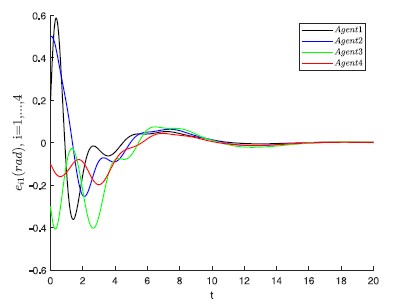
本工作从H∞控制角度解决了包含凸包不确定性多智能体系统的鲁棒协同输出调节问题。通过设计的自适应多智能体通信拓扑图代数连通度估计算法,首次构建了不依赖全局信息的完全分布式内模控制器。
这是本实验室首次在《Automatica》期刊上发表长篇代表性成果。《Automatica》是国际自动控制联合会(IFAC)创办的控制领域顶级期刊,该期刊对文章数学性与创新性要求极高,且接收的绝大部分论文为短文,只有少数论文才得以长文(Regular Paper)发表.
该工作得到了国家自然科学基金委优秀青年科学基金项目、面上项目、上海市科技重大项目的支持。
Chengcheng Fu, Hao Zhang, Chao Huang, Zhuping Wang, Huaicheng Yan, Adaptive cooperative output regulation of polytopic systems via spectrum estimation: An H∞ perspective. Automatica, 2023. (Regular Paper)
论文链接: https://www.sciencedirect.com/science/article/pii/S0005109823000948?via%3Dihub
作者其他论文:Chengcheng Fu, Hao Zhang, Chao Huang, Zhuping Wang, Huaicheng Yan, Fully Distributed cooperative output regulation for heterogeneous linear parameter-varying systems with directed graphs. IEEE Transactions on Control of Network Systems, 2022.

